链传动工作情况分析
一.链传动的运动分析
1.链传动的运动不均匀性
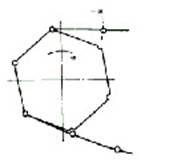
链条进入链轮后形成折线,因此链传动的运动情况和绕在正多边形轮子上的带传动很相似,见图9。边长相当于链节距p,边数相当于链轮齿数z。链轮每转一周,链移动的距离为zp,设z1、z2为两链轮的齿数,p为节距(mm),n1、n2为两链轮的转速(r/min), 则链条的平均速度v(m/s)为
v=z1pn1/60*1000=z2pn2/60*1000 (4)
由上式可得链传动的平均传动比 i=n1/n2=z2/z1 (5)
事实上,链传动的瞬时链速和瞬时传动比都是变化的。分析如下:设链的紧边在传动时处于水平位置,见图6.9。设主动轮以等角速度ω1转动,则其分度圆周速度为R1ω1。当链节进入主动轮时,其销轴总是随着链轮的转动而不断改变其位置。当位于β角的瞬时,链水平运动的瞬时速度 等于销轴圆周速度的水平分量。即链速v
v=cosβR1ω1 (6)
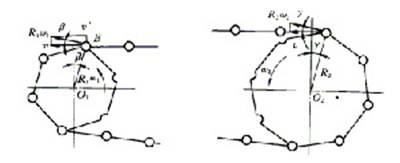
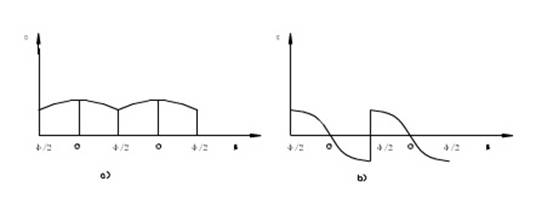
角的变化范围在±φ1/2之间,φ1=360。/z1。当β=0时,链速最大,vmax=R1ω1;当β=±φ1/2时,链速最小,vmin=R1ω1cos(φ1/2)。因此,即使主动链轮匀速转动时,链速v也是变化的。每转过一个链节距就周期变化一次,见图10。 同理,链条垂直运动的瞬时速度v`=R1ω1sinβ也作周期性变化,从而使链条上下抖动。
从动链轮由于链速v≠常数和γ角的不断变化(图9),因而它的角速度ω2=v/R2cosγ也是变化的。
链传动比的瞬时传动比i为 i=ω1/ω2=R2cosγ/R1cosβ (7)
显然,瞬时传动比不能得到恒定值。因此链传动工作不稳定。
2.链传动的动载荷
链传动在工作时产生动载荷的主要原因是:
(1)链速和从动链轮角速度周期性变化,从而产生了附加的动载荷。链的加速度愈大,动载荷也将愈大。链的加速度为
可见,链轮转速愈高、链节距愈大、链轮齿数愈少,动载荷都将增大。
(2)链沿垂直方向分速度 也作周期性地变化,使链产生横向振动,这也是链传动产生动载荷的原因之一。
(3)链节进入链轮的瞬时,链节与链轮轮 齿以一定的相对速度啮合,链与轮齿将受到冲击,并产生附加动载荷。如图6.11所示,根据相对运动原理,把链轮看作静止的,链节就以角速度-w进入轮齿而产生冲击。这种现象,随着链轮转速的增加和链节距的加大而加剧。使传动产生振动和噪声。
(4)若链张紧不好、链条松弛,在起动、制动、反转、载荷变化等情况下,将产生惯性冲击,使链传动产生很大的动载荷。
由于链传动的动载荷效应,链传动不宜用于高速。
二.链传动的受力分析
安装链传动时,只需不大的张紧力,主要是使链松边的垂度不致过大,否则会产生显著振动、跳齿和脱链。若不考虑传动中的动载荷,作用在链上的力有:圆周力(即有效拉力)F、离心拉力FC和悬垂拉力Fy。如图所示。
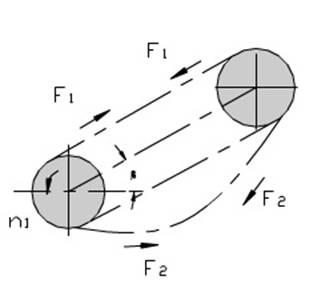
链在传动中的主要作用力有:
(1)链的紧边拉力为 F1=F+FC+Fy (N) (8)
(2)链的松边拉力为 F2=FC+Fy (N) (9)
(3)围绕在链轮上的链节在运动中产生的离心拉力FC=qv2 (N) (10)
式中:q为链的每米长质量,Kg/m,见表6.1;
v为链速m/s。
(4)悬垂拉力
可利用求悬索拉力的方法近似求得 Fv=Kvqga (N) (11)
式中: a为链传动的中心距,m;
g为重力加速度,g=9.81m/s2;
Kv为下垂量y=0.02a时的垂度系数,与安装角β有关(图12),见表3。
链作用在轴上的压力FQ可近似地取为FQ=(1.2~1.3)F,有冲击和振动时取大值。